#include <Middleware.h>
Public Member Functions | |
| Middleware (boost::asio::io_service &io_service, const libconfig::Config &cfg, const std::string &api_url, const std::string &iface) | |
| std::shared_ptr< Service > | get_service (const std::string &service_id) |
| void | set_service (const std::string &service_id, std::shared_ptr< Service > service) |
Private Member Functions | |
| void | tick_handler () |
| void | control_tick_handler () |
| bool | _handle_local_service_announcement () |
Private Attributes | |
| bool | _seamless = false |
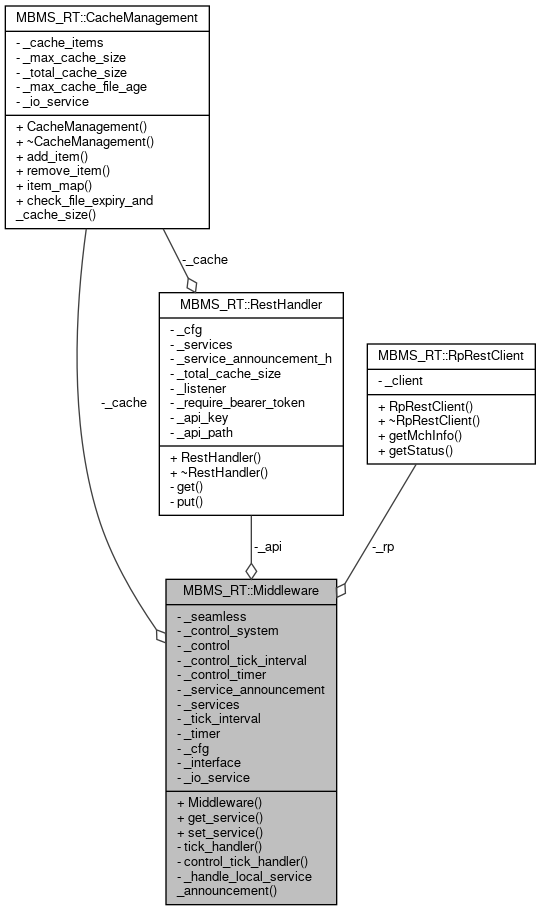
| MBMS_RT::RpRestClient | _rp |
| MBMS_RT::RestHandler | _api |
| MBMS_RT::CacheManagement | _cache |
| bool | _control_system = false |
| MBMS_RT::ControlSystemRestClient | _control |
| boost::posix_time::seconds | _control_tick_interval = boost::posix_time::seconds(10) |
| boost::asio::deadline_timer | _control_timer |
| std::unique_ptr< MBMS_RT::ServiceAnnouncement > | _service_announcement = {nullptr} |
| std::map< std::string, std::shared_ptr< Service > > | _services |
| boost::posix_time::seconds | _tick_interval |
| boost::asio::deadline_timer | _timer |
| const libconfig::Config & | _cfg |
| const std::string & | _interface |
| boost::asio::io_service & | _io_service |
Detailed Description
Definition at line 33 of file Middleware.h.
Constructor & Destructor Documentation
◆ Middleware()
| MBMS_RT::Middleware::Middleware | ( | boost::asio::io_service & | io_service, |
| const libconfig::Config & | cfg, | ||
| const std::string & | api_url, | ||
| const std::string & | iface | ||
| ) |
- Parameters
-
io_service cfg api_url iface
Definition at line 27 of file Middleware.cpp.
Member Function Documentation
◆ _handle_local_service_announcement()
|
private |
- Returns
- {bool} Whether a local SA file was used
Definition at line 54 of file Middleware.cpp.
◆ control_tick_handler()
|
private |
Definition at line 124 of file Middleware.cpp.
◆ get_service()
| auto MBMS_RT::Middleware::get_service | ( | const std::string & | service_id | ) |
◆ set_service()
|
inline |
Definition at line 38 of file Middleware.h.
◆ tick_handler()
|
private |
Definition at line 91 of file Middleware.cpp.
Member Data Documentation
◆ _api
|
private |
Definition at line 47 of file Middleware.h.
◆ _cache
|
private |
Definition at line 48 of file Middleware.h.
◆ _cfg
|
private |
Definition at line 62 of file Middleware.h.
◆ _control
|
private |
Definition at line 51 of file Middleware.h.
◆ _control_system
|
private |
Definition at line 50 of file Middleware.h.
◆ _control_tick_interval
|
private |
Definition at line 52 of file Middleware.h.
◆ _control_timer
|
private |
Definition at line 53 of file Middleware.h.
◆ _interface
|
private |
Definition at line 63 of file Middleware.h.
◆ _io_service
|
private |
Definition at line 64 of file Middleware.h.
◆ _rp
|
private |
Definition at line 46 of file Middleware.h.
◆ _seamless
|
private |
Definition at line 43 of file Middleware.h.
◆ _service_announcement
|
private |
Definition at line 56 of file Middleware.h.
◆ _services
|
private |
Definition at line 57 of file Middleware.h.
◆ _tick_interval
|
private |
Definition at line 59 of file Middleware.h.
◆ _timer
|
private |
Definition at line 60 of file Middleware.h.
The documentation for this class was generated from the following files:
- src/Middleware.h
- src/Middleware.cpp